Cogwheels
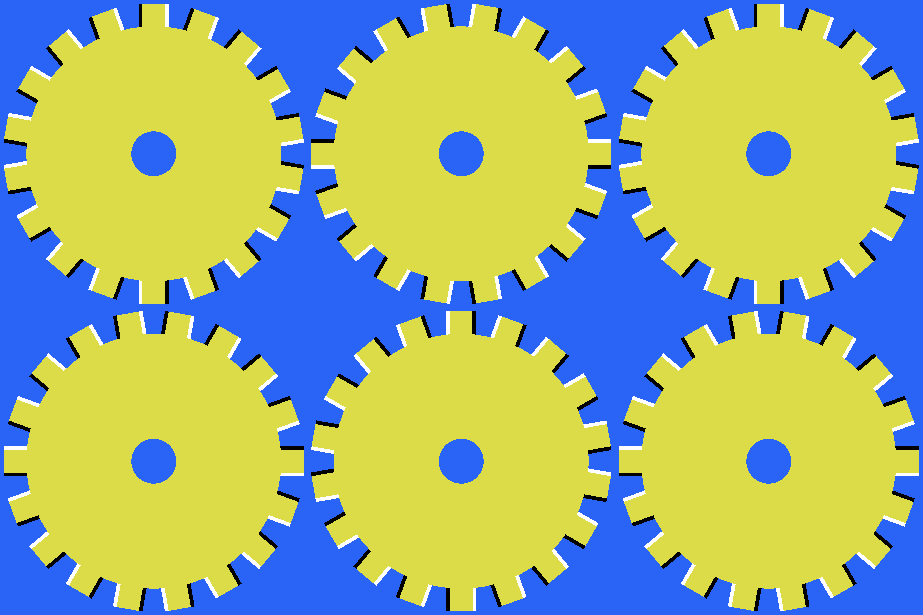
L'obiettivo di questa attività è costruire e visualizzare l'illusione ottica "Ingranaggi in movimento" (Akiyoshi's cogwheels), rappresentata nella grafica seguente:
Questa attività non offre una possibile decomposizione del problema e, di conseguenza, non presenta una struttura logica e lineare del programma da implementare. Quindi, prima di iniziare a scrivere codice prova a scomporre la grafica in sotto-grafiche elementari e a rilevare le funzioni da definire necessarie.
Suggerimento! Porta attenzione all'ideazione dei denti dell'ingranaggio. Le strisce bianche e nere ai lati dei denti sono collocate in maniera opposta in base alla rotazione dell'ingranaggio. Un'altro aspetto da considerare è la disposizione del singolo ingranaggio. La ruota dentata in alto a sinistra ha due denti paralleli all'asse verticale. Al contrario, la ruota dentata sotto a sinistra ha due denti paralleli all'asse orizzontale.
Geometria ruota dentata
Nella seguente figura è schematizzata la geometria di una ruota dentata:
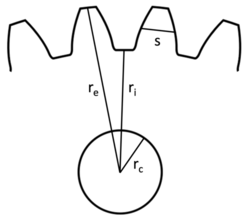
dove r_e è il raggio esterno, r_i è il raggio interno, r_c è il raggio del foro centrale e s è lo spessore del dente.
Prova tu!
Cosa hai imparato
Attraverso questa attività hai potuto acquisire le seguiti competenze:
- Decomposizione del problema. Questo approccio ti ha permesso di implementare e testare separatamente ogni aspetto del problema.
- Funzioni. L'utilizzo di funzioni ti ha permesso di impiegare più volte la medesima sequenza di istruzioni, semplificando il codice.
- Cicli. L'uso appropriato dei cicli ti ha permesso di gestire in modo efficiente situazioni in cui era necessario ripetere un'azione per un numero variabile di volte.
This activity has been created by Dal Pian and is licensed under CC BY-SA 4.0.
Cogwheels

PyTamaro is a project created by the Lugano Computing Education Research Lab at the Software Institute of USI
Privacy Policy • Platform Version 00e7fc6b (Tue, 28 Jul 2026 16:05:39 GMT)